🚀 v1.0 Tech Demo Available! Download Windows Demo (Zip) - Requires NVIDIA GPU
A high-performance CPU/GPU voxel engine built from scratch in C++20. Designed as a foundational framework for Computational Engineering (CAE) simulations, focusing on cache coherency, hardware-accelerated rendering, custom memory allocators, and low-level memory management.


🚀 Overview
This project is a technical playground for implementing high-performance graphics concepts without relying on commercial game engines. The engine is architected to support Finite Element Analysis (FEA) and Physics Simulations in later stages.
Core Engineering Pillars:
- Data-Oriented Design: Struct-of-Arrays (SoA) layout for voxel data to maximize CPU cache hits.
- Custom Math Library: SIMD-ready vectors and matrices implementation.
- Systems Hardening: Zero-warning codebase enforced by CI/CD (
/WX(MSVC) and-WerrorGCC/Clang). - Modern OpenGL (4.5): Direct State Access (DSA) and optimized buffer streaming for voxel generation.
- Memory Management: Leveraging C++20 features and RAII/Move Semantics for deterministic resource lifecycles.
- Zero-Dependency: Managing memory, windowing context, and resources manually without heavy frameworks.
🛠️ Tech Stack
| Component | Technology | Reasoning |
|---|---|---|
| Language | C++20 | Concepts, Modules, constexpr math optimizations. |
| Graphics | OpenGL 4.5 | Core Profile for compute-shader readiness and DSA. |
| Build System | CMake 3.23+ | FetchContent for dependency-free setup. |
| Windowing | GLFW 3.4 | Robust cross-platform context management. |
| Loader | GLAD | Dynamic loader for OpenGL function pointers. |
| Math | Custom SIMD | Hand-rolled Vector/Matrix library for solver integration. |
| Procedural | FastNoiseLite | OpenSimplex2 noise for infinite terrain generation. |
| Asset | stb_image | Lightweight image loading for texture atlases. |
| Testing | GoogleTest | Automated verification for Physics and Math logic. |
| Documentation | Doxygen & Graphviz | Automated API reference and class dependency graph generation. |
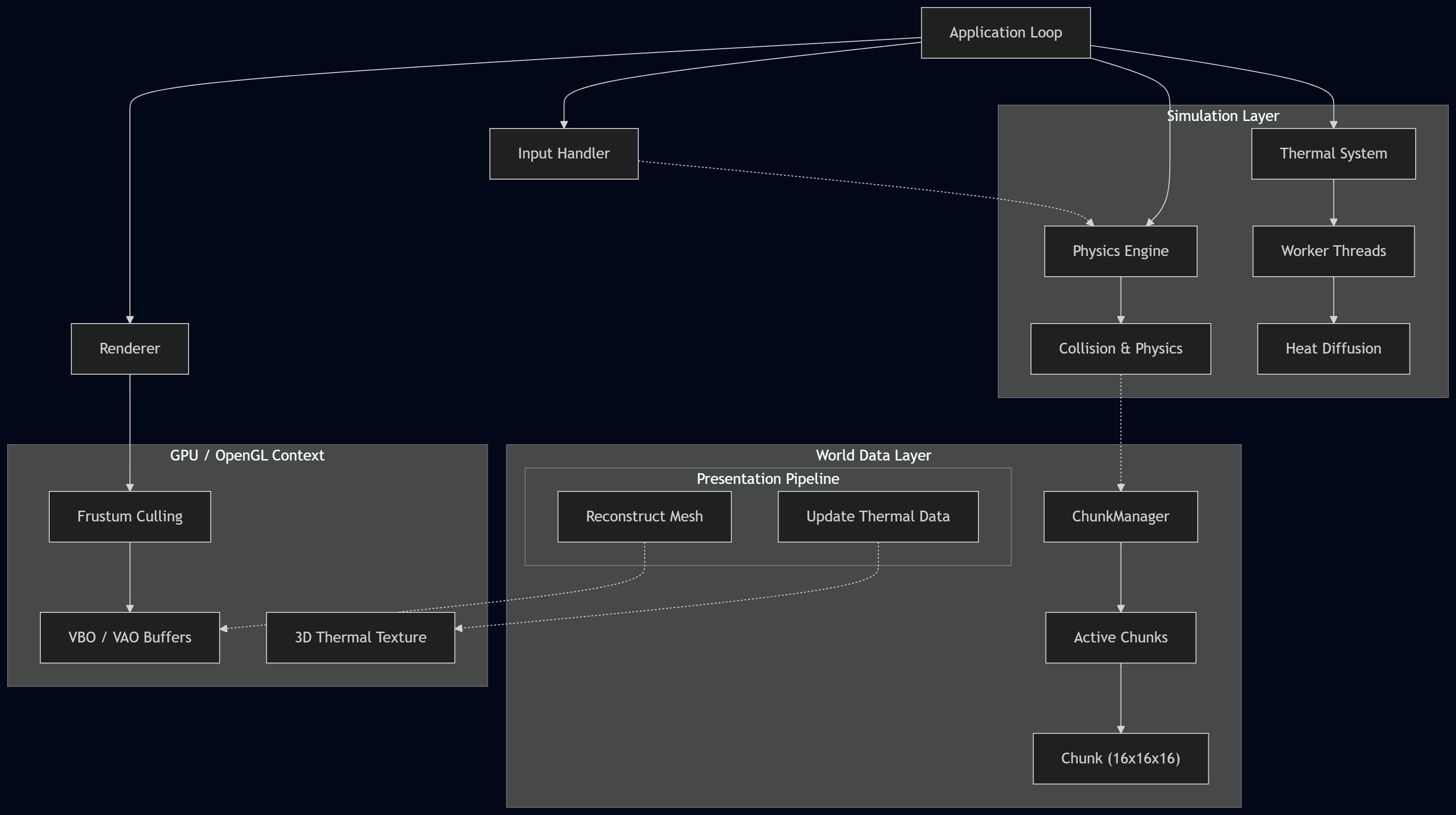
📐 System Architecture
The engine follows a strict separation of concerns between the Simulation Loop (Fixed Timestep) and Rendering Loop (Variable Timestep).
✨ Key Features (Current & Planned)
✅ Completed
- [x] Thermodynamics & SIMD Physics:
- AVX2 Vectorization: The core 3D finite difference equation is heavily vectorized using bare-metal AVX2 Intrinsics, processing 8 contiguous voxels per CPU cycle (achieving a ~23% reduction in frame time).
- Domain Decomposition (Ghost Cells): Utilizes an 18x18x18 padded memory architecture (Halo Exchange) for lock-free heat transfer across parallel chunk boundaries.
- Zero-Copy GPU Visualization: Thermal data is asynchronously packed and uploaded to a
GL_TEXTURE_3Dvolume via OpenGL DSA withGL_LINEARinterpolation. - Von Neumann Boundaries: Enforces reflective boundary conditions to strictly conserve thermal energy within the loaded simulation bounds.
- Memory Hardened: Strictly validated with Linux/GCC AddressSanitizer (ASAN) and LeakSanitizer (LSAN) to guarantee zero memory leaks or Use-After-Free (UAF) errors.
- [x] High-Performance Rendering:
- Frustum Culling: CPU-side optimization checking Chunk AABBs against camera planes.
- Hidden Face Removal: Internal and Inter-Chunk occlusion culling (reducing vertex count by ~85%).
- Distance Fog: Exponential fog shader to mask world borders and chunk loading.
- Smart Texturing: Dynamic UV mapping with bitwise face-id logic.
- [x] Core Architecture:
- Region-Based Persistence: Custom
.mcrfile system that saves modified chunks to disk (Run-Length Encoded). - Worker Thread Pool: Asynchronous job system for non-blocking chunk generation and mesh building.
- ImGui Debugger: Real-time performance profiling and variable tuning (toggle via
~key). - Zero-Warning Policy: CI pipeline enforcing
clang-formatand strict linting (/WX,-Werror).
- Region-Based Persistence: Custom
- [x] Physics & Interaction:
- AABB Collision: Precise Axis-Aligned Bounding Box detection against voxel terrain.
- Kinematic Character Controller: "Collide & Slide" resolution for smooth movement.
- Infinite Streaming: Dynamic loading/unloading of chunks based on player position.
- Fly Mode: Creative-mode flight with noclip and variable speed control.
- Ray Casting: DDA (Digital Differential Analyzer) algorithm for O(1) block picking.
- [x] Engine Core:
- Custom Math Library:
Vec3/Mat4implementation withconstexprand SIMD-ready optimization. - Interactive Camera: Euler-angle based FPS camera with WASD movement, Mouse Look, and Zoom.
- Render Context: Robust GLFW window handling and input polling.
- Thread Safety: Mutex-guarded chunk management for safe multi-threaded loading.
- Custom Math Library:
- [x] Procedural Generation:
- Infinite Terrain: Continuous world generation using
FastNoiseLite. - Biome System: Height-based block assignment (Bedrock, Stone, Dirt, Grass).
- Infinite Terrain: Continuous world generation using
- [x] Build & CI:
- Zero-Dependency Setup: Self-contained CMake build using
FetchContent. - Automated Testing: GoogleTest suite for Math/Physics verification running on GitHub Actions.
- Automated Docs: Doxygen & Graphviz integration for API documentation.
- Zero-Dependency Setup: Self-contained CMake build using
🚧 Backlog (Next Sprint: Physics & Solvers)
- [ ] Greedy Meshing: Merging adjacent faces of the same type to drastically reduce vertex count and GPU memory bandwidth.
- [ ] Grid-Based Fluid Dynamics: Implementing volumetric fluid flow using Cellular Automata / Lattice Boltzmann Method (LBM) for real-time simulation.
🧊 Roadmap (Icebox)
- [ ] Persistent Mapped Buffers: Transitioning to OpenGL 4.5 DSA persistent mapped VBOs for zero-copy PCIe geometry transfers during active block editing.
- [ ] Morton Encoding (Z-Order Curve): Reordering chunk memory layout to drastically improve spatial CPU cache locality.
- [ ] Compute Shaders: Moving voxel procedural generation from the CPU Thread Pool to the GPU via OpenGL 4.5 SSBOs.
- [ ] Sparse Voxel Octrees (SVO): Transitioning from a dense grid to an SVO to support massive render distances and memory compression.
- [ ] Directional Shadow Mapping: Cascaded Shadow Maps (CSM) for dynamic, large-scale sun lighting.
📦 Build Instructions
Prerequisites
- C++ Compiler: MSVC (Visual Studio 2022) or GCC 11+
- CMake: Version 3.23 or higher
- GPU Drivers: Must support OpenGL 4.5
Steps
- Clone the repository:
bash git clone https://github.com/KabilanKumar36/cpp-hpc-voxel-engine.git cd cpp-hpc-voxel-engine - Generate Project Files:
bash mkdir build cd build cmake .. - Build: Open the generated solution in Visual Studio or run:
bash cmake --build . --config Release - Run:
bash ./bin/Release/VoxelEngine.exe
🧪 Testing
The project uses GoogleTest for unit testing. The build system automatically fetches the dependency and compiles the test suite.
Running Tests
- Configure & Build:
bash cmake -B build cmake --build build - Run the Test Executable:
bash ./build/bin/unit_tests.exe
Coverage:
- Physics Logic: AABB intersection and construction assertions.
- OpenGL Environment: Automated invisible window creation for context-dependent tests.
- Chunk Logic: Verification of mesh generation and buffer sizing.
📂 Project Structure
📜 License
Distributed under the MIT License. See LICENSE for more information.